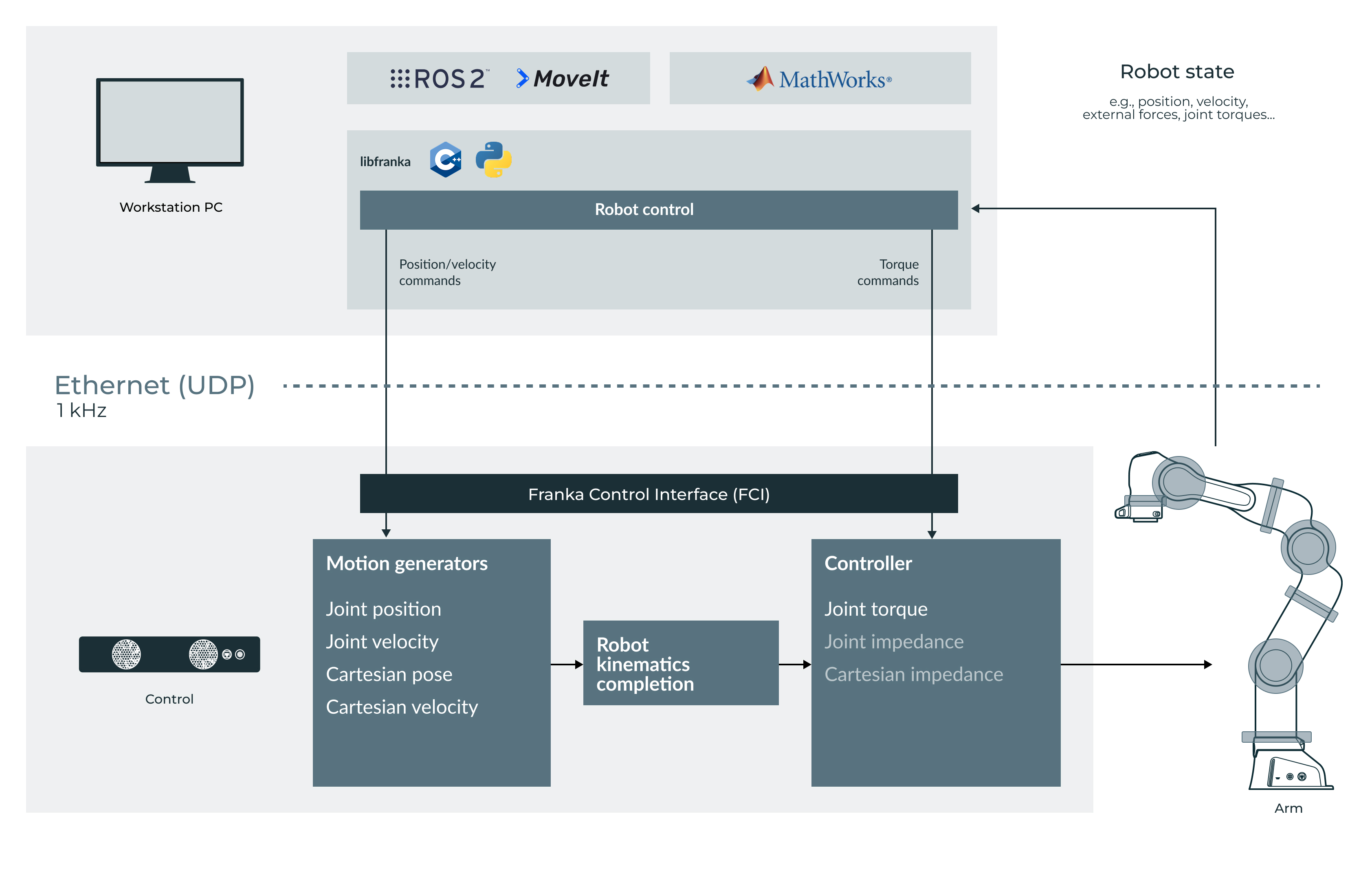
Franka Control Interface(FCI)は、アームおよびハンドへの高速かつ直接的な低レベル双方向接続を可能にします。ロボットの現在の状態を提供し、イーサネット経由で接続された外部ワークステーションPCからの直接制御を可能にします。当社のオープンソースC++インターフェースであるlibfrankaを使用することで、以下の5種類のインターフェースを通じて、1 kHzのリアルタイム制御値を送信できます:
重力および摩擦補正付き関節レベルのトルクコマンド。
関節位置または速度コマンド。
デカルト空間における姿勢または速度コマンド
同時に、以下の1 kHz測定値へのアクセスが可能になります:
関節データ(位置、速度、リンク側のトルクセンサー信号など)。
外部から加えられたトルクおよび力の推定値。
各種衝突および接触情報。
ロボットモデルライブラリは以下を提供します:
すべてのロボット関節の順運動学。
すべてのロボット関節のヤコビアン行列。
動力学、慣性行列、コリオリ力ベクトル、重力ベクトル。
さらに、franka_rosはFrankaロボットをROS 2エコシステム全体と接続し、libfrankaをROS 2 Controlに統合します。これには、当社のロボットおよびエンドエフェクタのURDFモデルと詳細な3Dメッシュが含まれており、可視化(例:RViz)やGazeboシミュレーションが可能になります。さらに、MoveIt!との統合により、モーションプランニングとグリッパー制御が簡素化され、ROS 2を使用してロボットを操作する方法を示す実装例も用意されています。
.png)



.svg)



_resized.png)