Franka GELLO and Franka GELLO Duo are teleoperation devices for the FR3 and FR3 Duo, enabling direct joint-level teleoperation for robot teaching, data collection, and imitation learning workflows. Available in single and dual-arm configurations, fully open source and ready to use.
Franka GELLO and GELLO Duo are fully open source, including mechanical design and software stack. You can build and modify the system yourself, or use the pre-assembled tested version provided by Franka Robotics. This enables both rapid deployment and full customization depending on the use case.
READY-TO-USE TELEOPERATION SYSTEM
Franka GELLO and Franka GELLO Duo integrate with FR3 and FR3 Duo via the ROS 2 framework, enabling low-latency joint control and gripper actuation (Franka Hand and Robotiq). With devcontainer support and a structured setup, users can quickly install and run the system for robot teaching and demonstration generation.
IMITATION LEARNING AND BIMANUAL MANIPULATION
GELLO is commonly used for data collection in learning-based robotics applications. Typical use cases include imitation learning, bimanual manipulation tasks, deformable object handling, and research on coordinated dual-arm control.
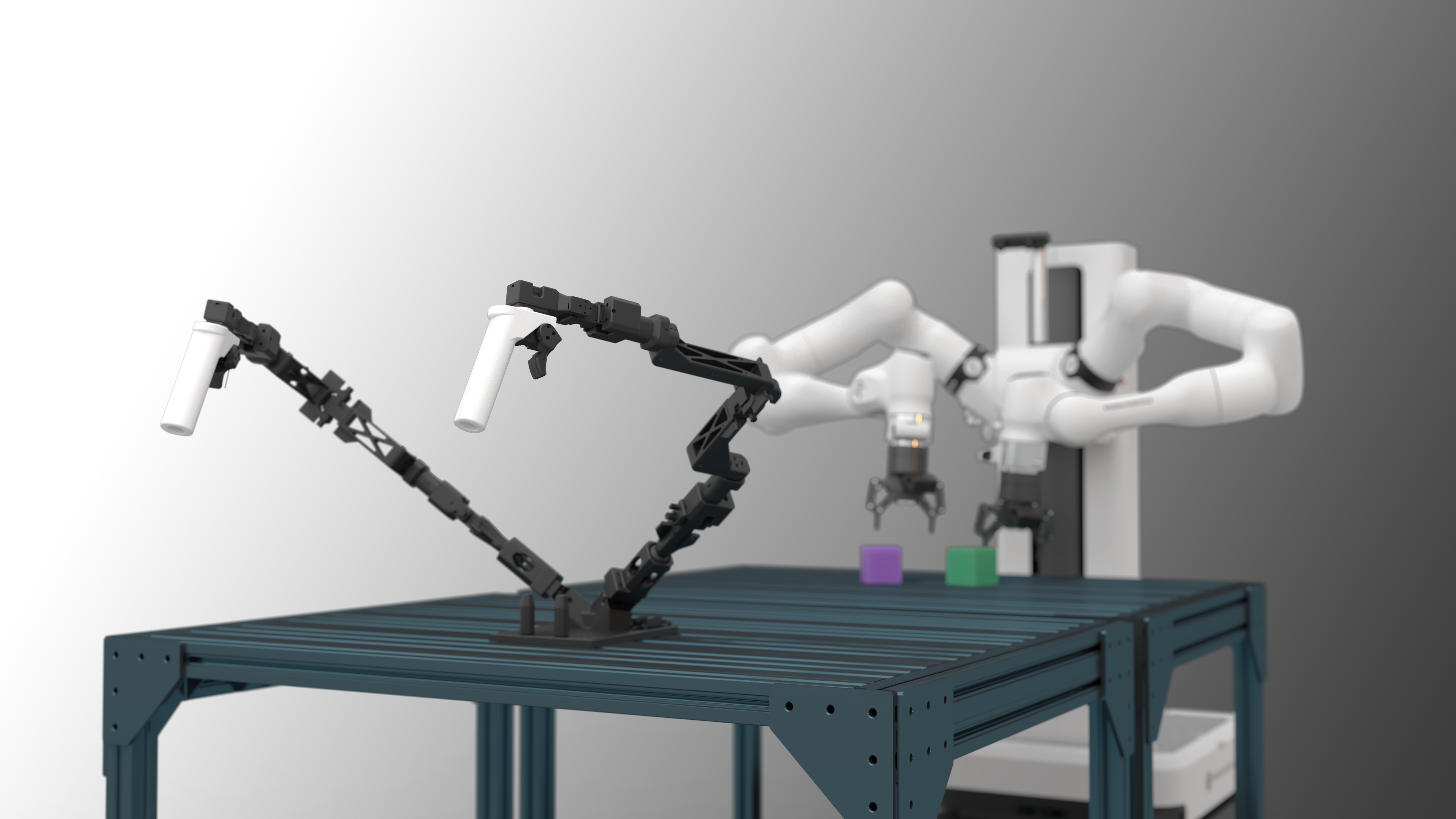
SINGLE AND DUAL-ARM CONFIGURATIONS
Franka GELLO is the single-arm version for FR3, used for individual robot teaching and data generation. Franka GELLO Duo extends this to FR3 Duo for bimanual teleoperation and synchronized dual-arm data collection. Both systems share the same open-source foundation and are also available as fully assembled systems from Franka Robotics.
OPEN-SOURCE RESOURCES
COMMUNITY
OPEN-SOURCE HARDWARE & SOFTWARE
Franka GELLO is fully open source — from the mechanical design to the software stack. All STL files for 3D printing are publicly available, covering every structural component from the base mount to the trigger assembly. And the ROS 2 integration enables low-latency joint control and gripper actuation out of the box. Print the hardware, use the software stack, or extend it for new research applications.
The resource hub for developers working with the Franka Research 3 robot platform. Dive into a wealth of tools, libraries and documentation designed to accelerate your development journey. Whether you're a seasoned developer or just starting out, you'll find everything you need to build, create and innovate.
.png)

