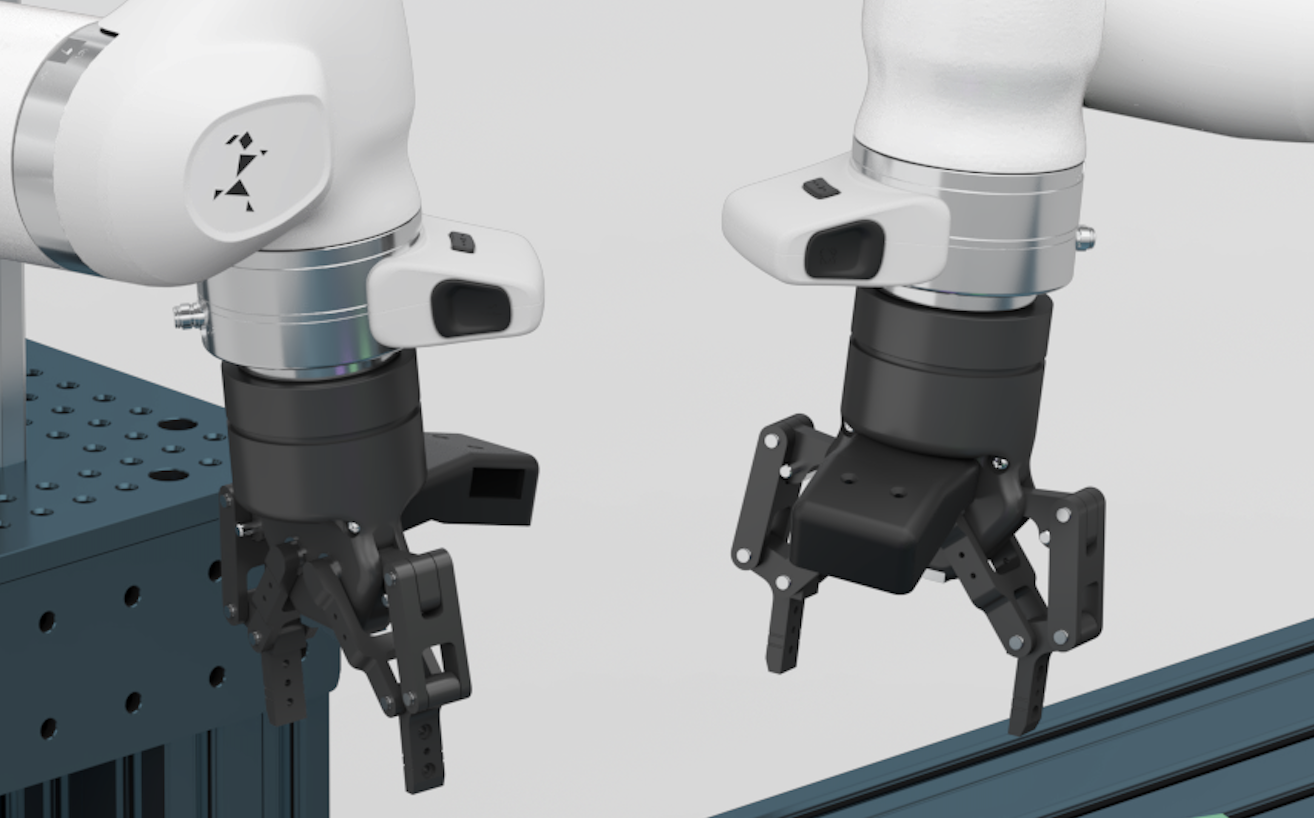
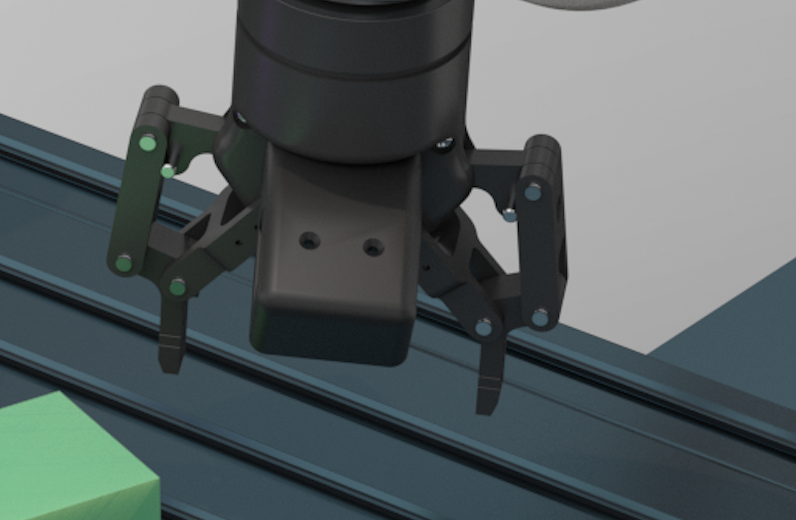
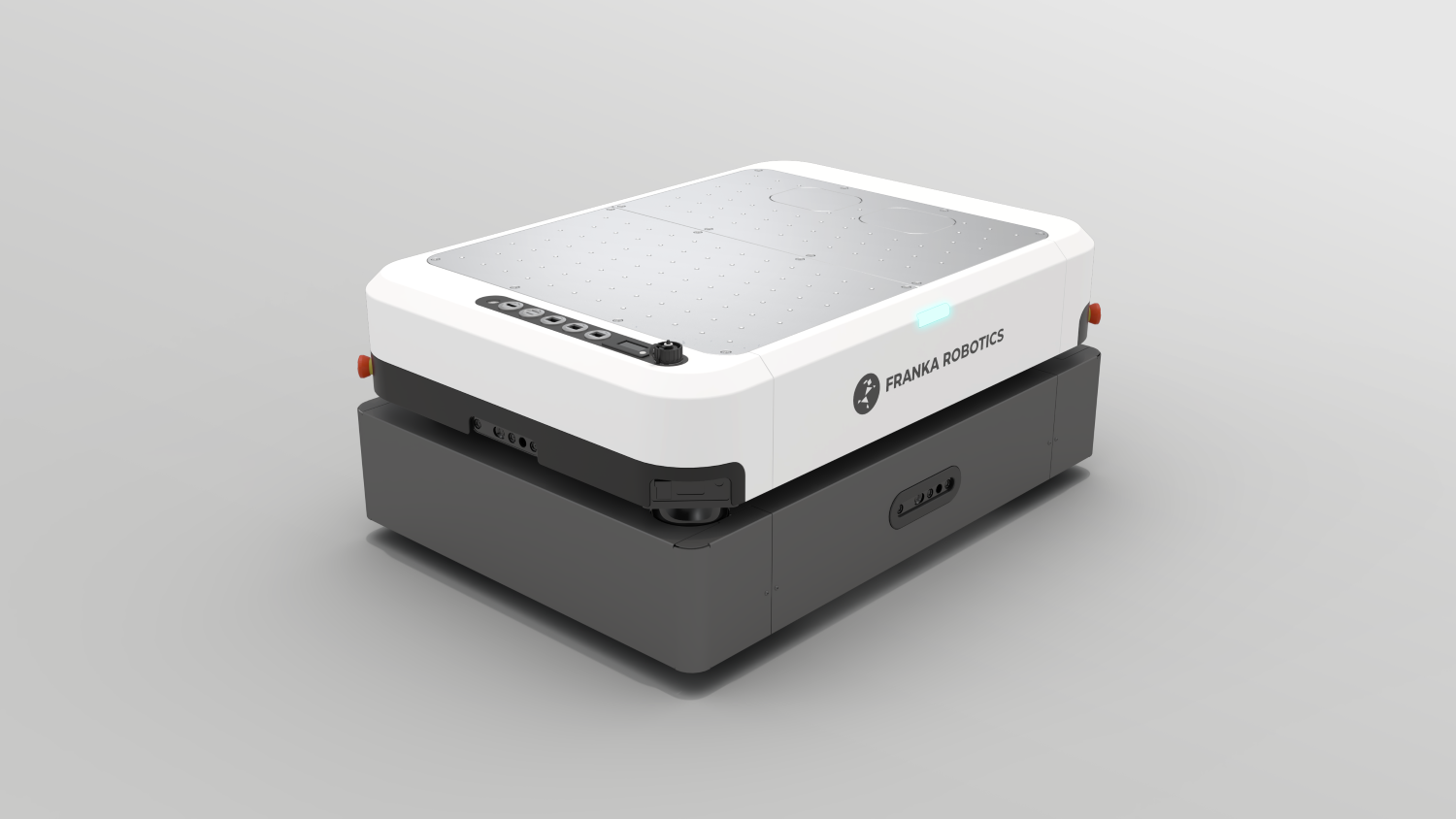
ADVANCED PERCEPTION AND EXTENSIBILITY
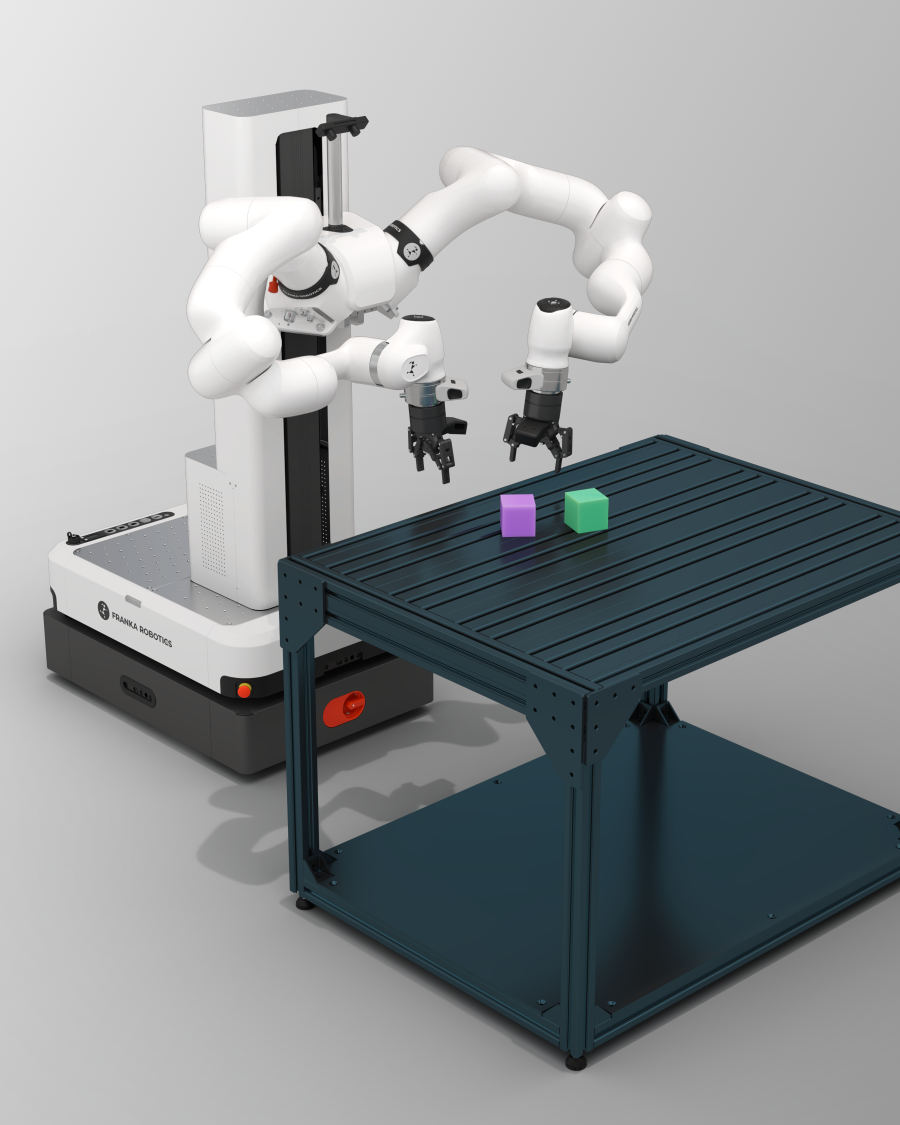
Mobile FR3 Duo inherits TMR’s full sensor suite – LiDAR, cameras, IMU – and combines it with FR3’s tactile sensitivity and vision and manipulation accessories for FR3 Duo. Standardized mounting points allow extension with additional sensors, compute units, or task-specific tools, ensuring adaptability for evolving research needs.
.png)



.svg)



_resized.png)