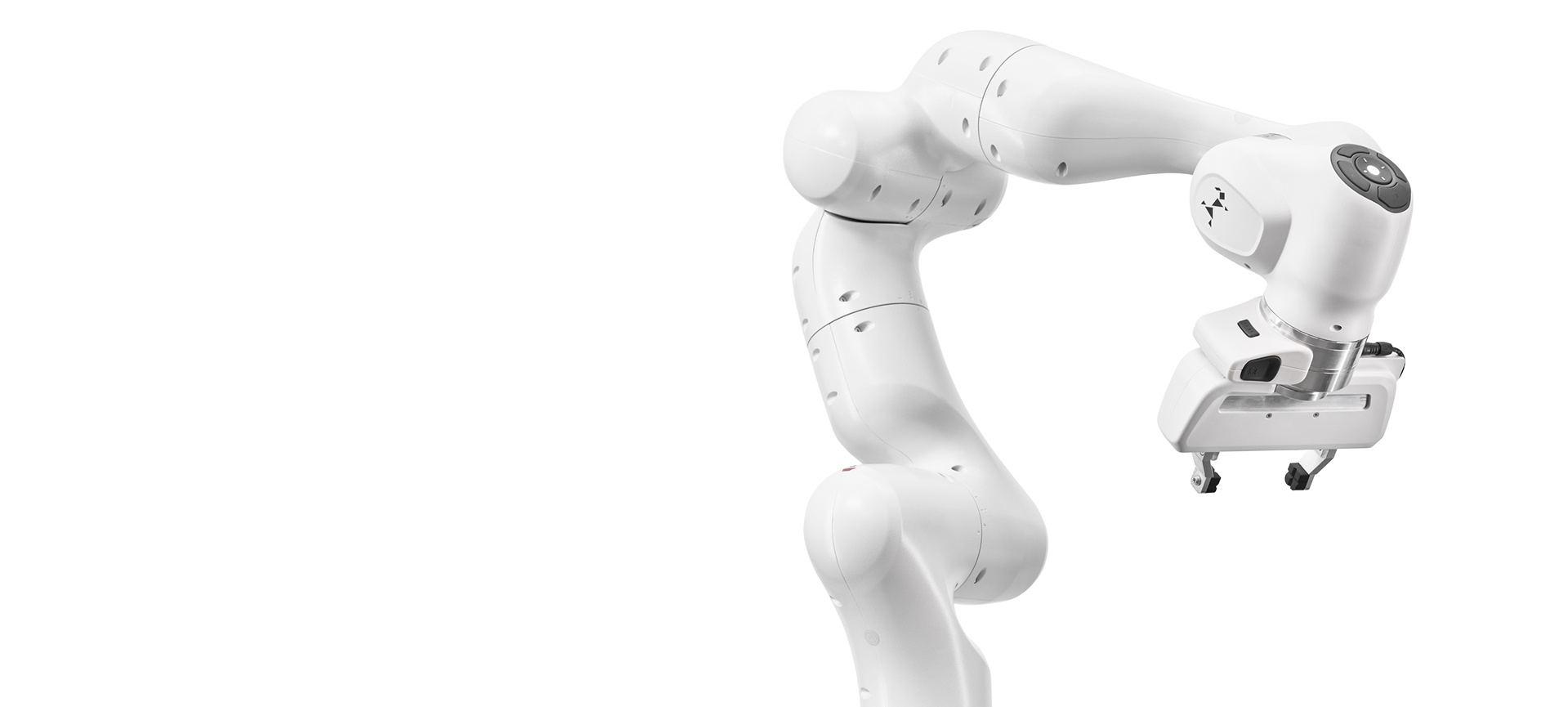
DIANA 7 VON AGILE ROBOTS UNTERSTÜTZT FCI
Der kraftempfindliche Roboter Diana 7 überzeugt mit seinen 7 Achsen, hoher Präzision und intuitiver Software, die eine einfache Bedienung ohne fortgeschrittene Programmierkenntnisse ermöglicht. Die Einführung von FCI ermöglicht es den Nutzern, Software-Schichten zu umgehen und direkt auf die Steuerungsalgorithmen des Roboters zuzugreifen, wodurch Diana 7 auch für die Forschung geeignet ist.