FCI는 내부 변환 없이 로봇의 저수준 실시간 제어를 제공합니다. 내부 감시는 자체 손상만 방지합니다. 조인트 공간의 위치, 속도, 토크는 물론 카테시안 공간의 위치와 속도를 포함한 제어 루프에 접근할 수 있습니다.
데이터 수집
센서와 모델의 시스템 상태 데이터를 1kHz로 수집하세요. FCI는 외력 추정과 추가 인사이트도 제공합니다.
커뮤니티
계속 성장하는 Franka Robotics 커뮤니티에 참여하고 C++, ROS 2 또는 MATLAB & Simulink를 활용해 로보틱스 혁신을 가속화하세요.
안전
작업자 보호를 보장하기 위해 맞춤형 안전 규칙을 구현하세요.
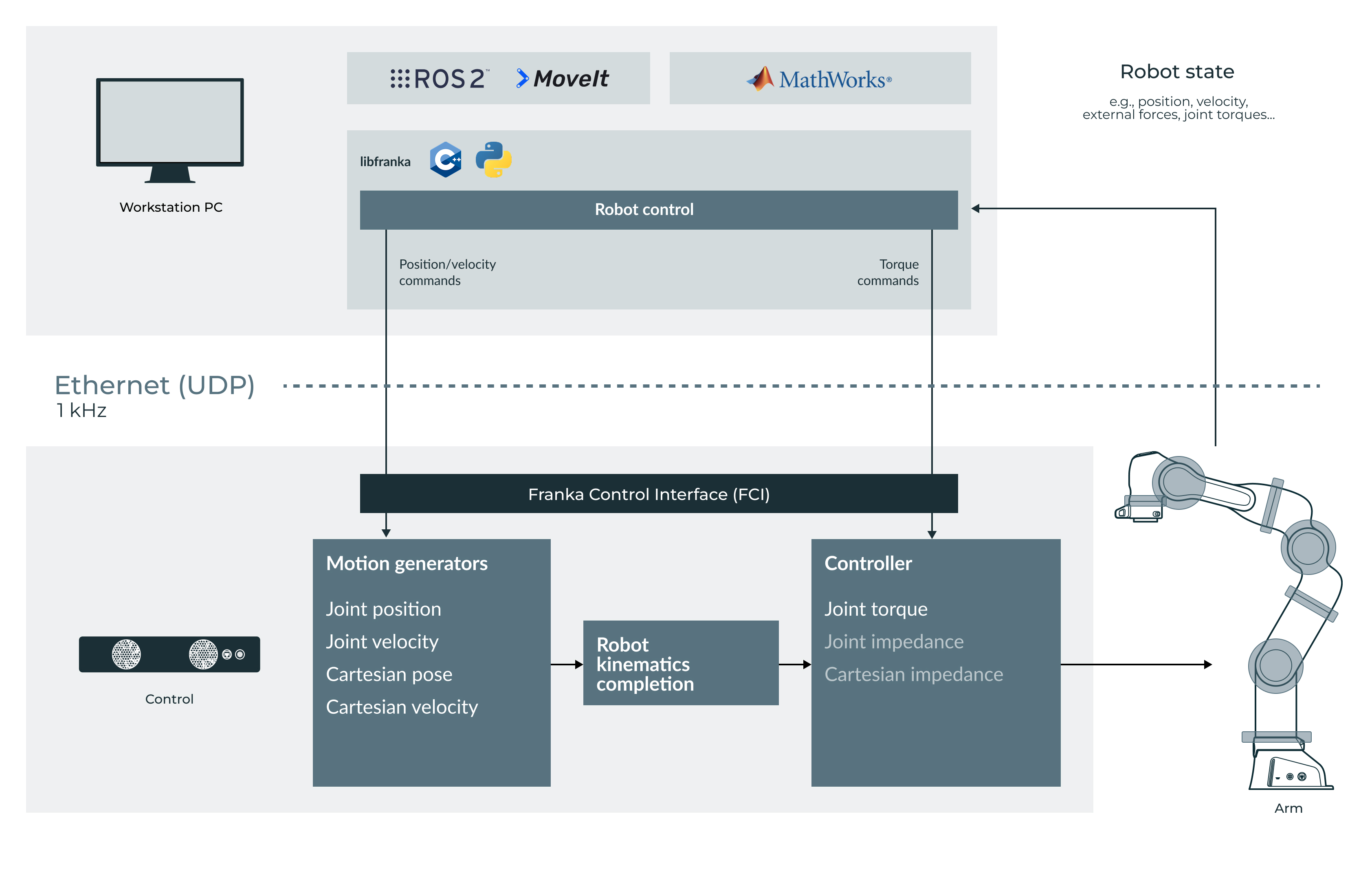
실시간 제어 및 ROS 통합
Franka Control Interface(FCI)는 암과 손에 대한 빠르고 직접적인 저수준 양방향 연결을 제공합니다. 로봇의 현재 상태를 제공하고 Ethernet으로 연결된 외부 워크스테이션 PC를 통해 직접 제어할 수 있습니다. 당사의 오픈 소스 C++ 인터페이스인 libfranka를 사용하면 5가지 서로 다른 인터페이스로 1kHz의 실시간 제어 값을 전송할 수 있습니다.
중력 및 마찰 보상이 포함된 조인트 수준 토크 명령
조인트 위치 또는 속도 명령
카테시안 포즈 또는 속도 명령
동시에 다음의 1kHz 측정값에도 접근할 수 있습니다.
조인트 데이터(예: 위치, 속도 및 링크 측 토크 센서 신호)
외부에서 가해진 토크와 힘의 추정값
다양한 충돌 및 접촉 정
로봇 모델 라이브러리는다음을 제공합니다:
모든 로봇 조인트의 운동학
모든 로봇 조인트의 자코비안 행렬
동역학, 관성 행렬, 코리올리 항 및 중력 벡터
또한,franka_ros는 Franka 로봇을 전체 ROS 2 생태계와 연결하며, libfranka를 ROS 2 Control에 통합합니다. 여기에는 URDF 모델과 당사 로봇 및 엔드 이펙터의 상세한 3D 메시가 포함되어 있어 시각화(예: RViz) 및 Gazebo 시뮬레이션이 가능합니다. 또한,MoveIt! 통합은 모션 계획과 그리퍼 제어를 간소화하며, 예제 구현을 통해 ROS 2를 사용하여 로봇을 작동하는 방법을 보여줍니다.
개발
구축, 창조, 혁신
FRANKA ROBOT 플랫폼에서 개발
Franka Research 3 로봇 플랫폼에서 작업하는 개발자들을 위한 리소스 허브입니다. 다양한 도구, 라이브러리 및 문서를 살펴보고 개발 여정을 가속화하세요. 숙련된 개발자이든 이제 막 시작하는 분이든, 구축하고 만들고 혁신하는 데 필요한 모든 것을 찾을 수 있습니다.




.svg)


.png)