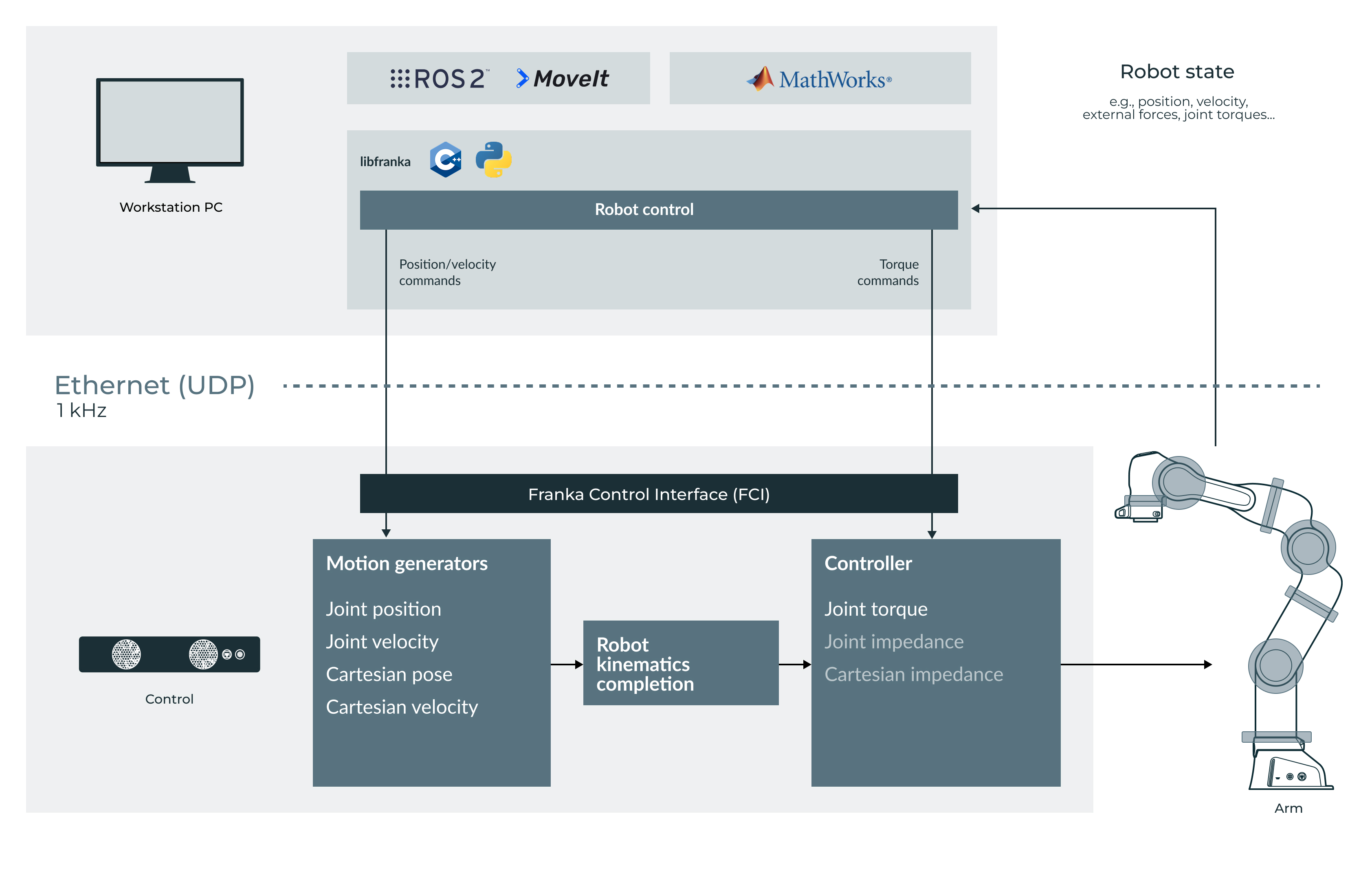
REAL-TIME CONTROL VIA FCI
TMR supports high-frequency control at 1 kHz via Franka Control Interface (FCI), fully integrated with ROS 2. This allows precise, low-latency motion control and force interaction, making the platform suitable for demanding tasks such as teleoperation, reactive manipulation, and mobile AI research.




.svg)


.png)