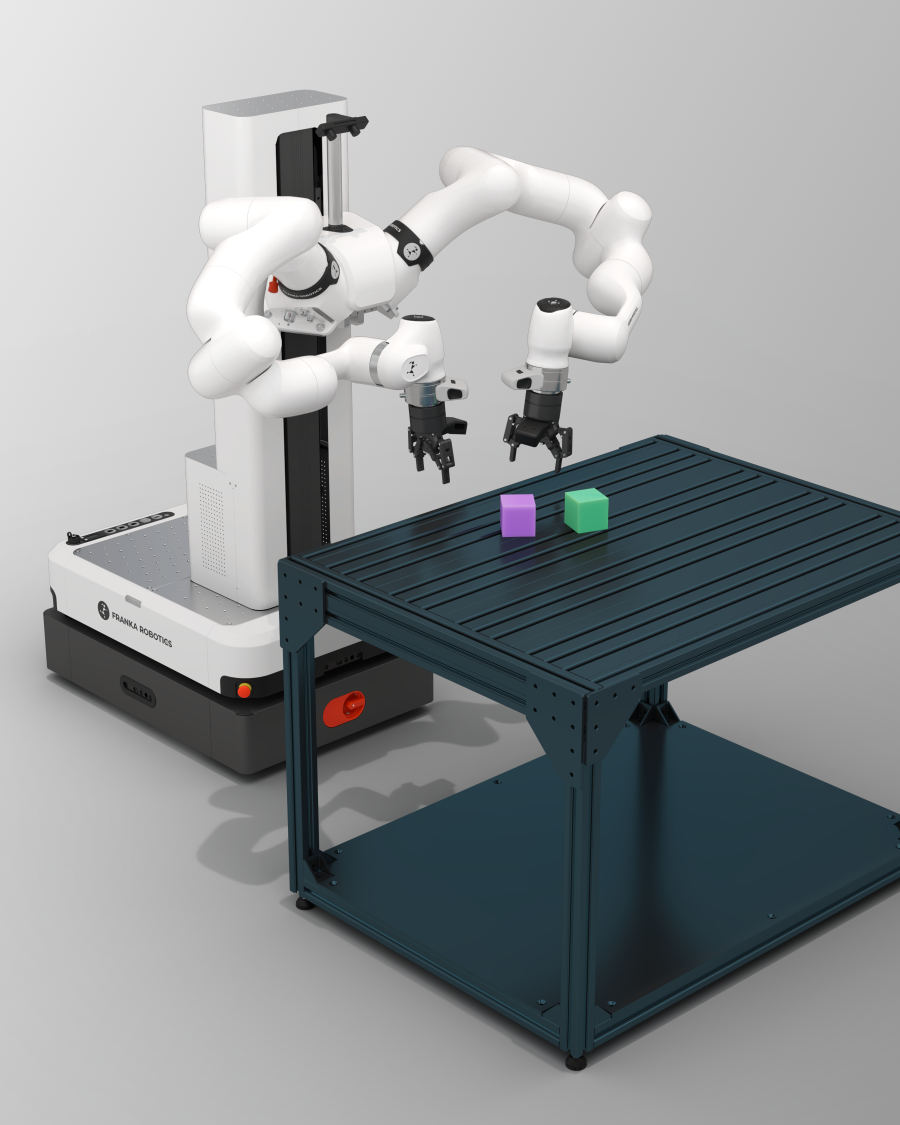
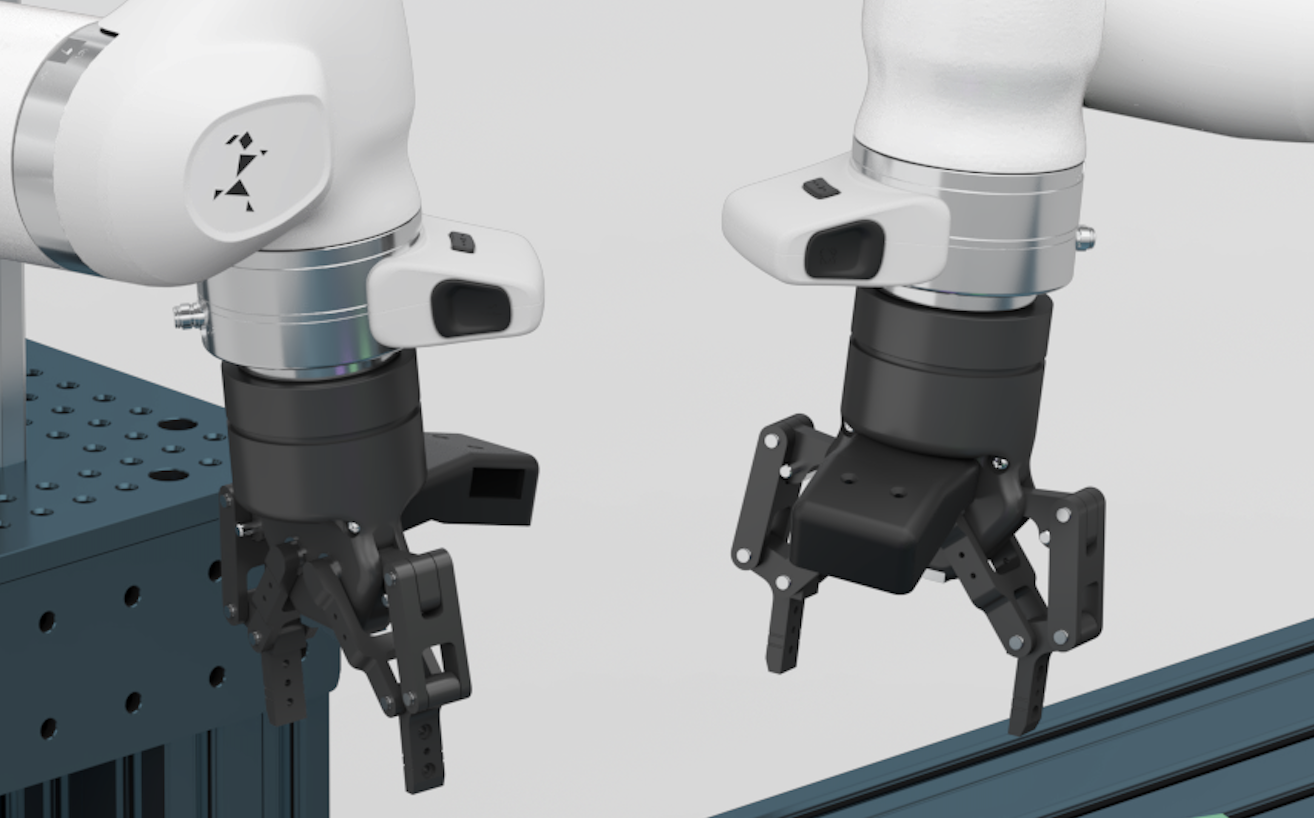
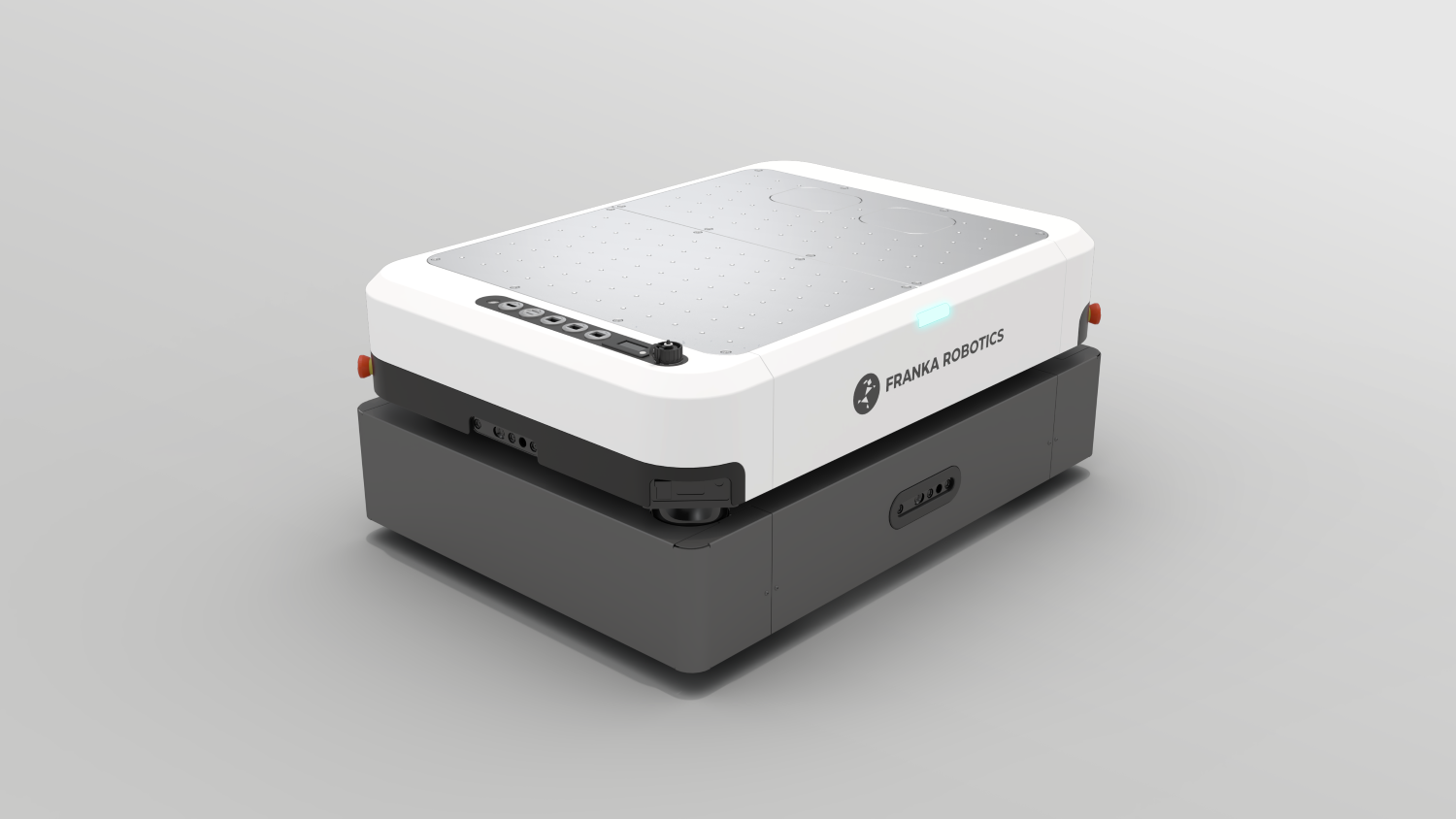
Mobile FR3 Duo는 Tactile Mobile Robot(TMR)과 통합하여 FR3 Duo 레퍼런스 플랫폼을 모바일 환경으로 확장합니다. 듀얼 암 조작, 풍부한 인지, 전방향 이동성을 하나의 피지컬 AI 시스템에 결합하여, 고정된 작업 셀을 넘어 데이터 수집과 정책 실행을 가능하게 합니다.
Mobile FR3 Duo는 동적 환경에서 텔레오퍼레이션, 데이터세트 생성, 정책 실행을 통합합니다. FR3 Duo의 최적화된 듀얼 암 운동학과 TMR의 전방향 베이스를 결합하여, 실제 조작 작업을 위한 전신 협응을 가능하게 합니다.
통합형 모바일 매니퓰레이션
기계, 전기, 소프트웨어 인터페이스가 사전 통합되어 있습니다. 이 시스템은 일관된 아키텍처로 제공되어, 베이스와 매니퓰레이션을 별도로 조립하는 것과 비교해 통합 시간을 획기적으로 줄여줍니다. 이로써 연구자는 시스템 엔지니어링보다 실험에 집중할 수 있습니다.
피지컬 AI를 위한 레퍼런스 플랫폼
전 세계 연구자들은 모델 학습을 위해 레퍼런스 구성을 사용해 공동 데이터세트를 생성하거나, 다른 이들의 데이터세트를 재사용할 수 있다는 이점을 누립니다. 또한 동일한 구성을 사용함으로써 모델을 파인튜닝하고, 별도 설정 없이 정책을 실행하며, 정책 성능 운영을 벤치마킹할 수 있습니다.
첨단 인지 및 확장성
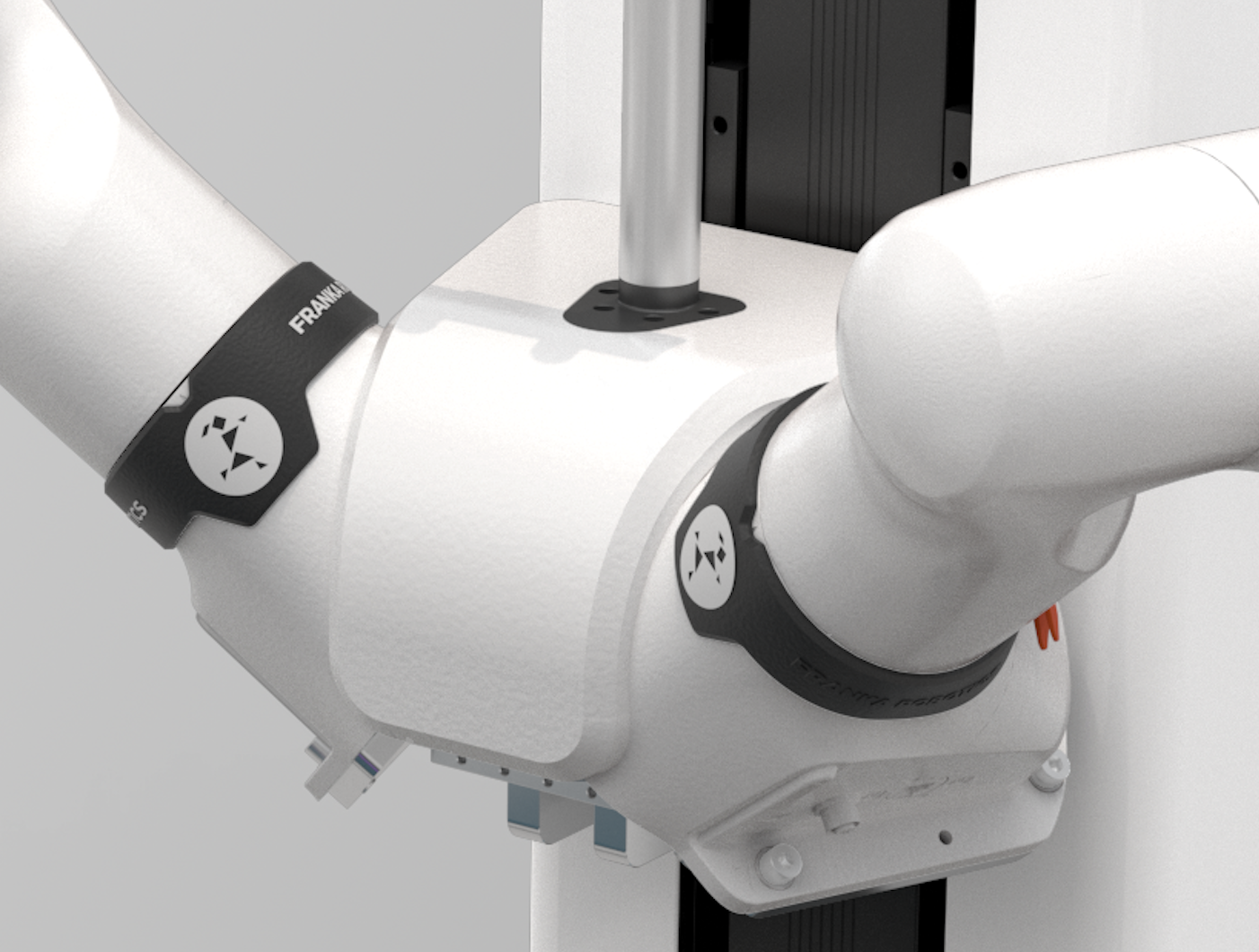
Mobile FR3 Duo는 TMR의 전체 센서 제품군인 LiDAR, 카메라, IMU를 계승하고, 이를 FR3 Duo용 FR3의 촉각 감지 능력 및 비전·매니퓰레이션 액세서리와 결합합니다. 표준화된 장착 지점을 통해 추가 센서, 컴퓨팅 유닛 또는 작업별 도구로 확장할 수 있어, 변화하는 연구 요구에 맞춰 적응할 수 있습니다.
베이스 크기
800x580x294 mm
암당 작업 반경
855 mm
가반하중
100 kg (베이스) 3 kg (암당)
최대 속도
1,75 m/s
내장 센서
14x 암 토크 센서, 2x LiDAR, 7x 카메라, 1x IMU
사용자 PC
NVIDIA Jetson AGX Orin
연결
Wi-Fi, 이더넷, USB, 블루투스
포함 사항 및 옵션
통합 노력 감소 및 재현 가능한 결과
Mobile FR3 Duo에는 FR3 로봇 2대와 FR3 Duo Mount 및 FR3 Duo Cover로 구성된 FR3 Duo Mounting Kit 1세트가 포함됩니다.Tactile Mobile Robot(TMR)도 포함됩니다.
FR3 Duo는 Franka가 구성한 FR3 Duo Vision and Manipulation Kit와 함께 제공될 수 있습니다.전체 옵션 키트에는 공용 전원 공급 장치가 포함된 Robotiq 2F-85 그리퍼 2개, 전용 홀더와 케이블링이 포함된 RealSense D405 손목 카메라 2대, Franka Head Bracket에 장착된 Stereolab ZED Mini 스테레오 카메라 1대가 포함됩니다.
첨단 모션 제어
FRANKA CONTROL INTERFACE (FCI)
Franka Control Interface(FCI)는 로봇에 대한 세밀한 제어와 실시간 센서 데이터 접근이 필요한 로보틱스 전문가를 위해 설계되었습니다. 이는모션 제어 연구와 대부분의 로봇으로는 구현할 수 없는 매우 특정한 동작 개발에 이상적입니다.
FCI는 내부 변환 없이 로봇의 저수준 실시간 제어를 제공합니다. 내부 감시는 자체 손상만 방지합니다. 조인트 공간의 위치, 속도, 토크는 물론 카테시안 공간의 위치와 속도를 포함한 제어 루프에 접근할 수 있습니다.
데이터 수집
센서와 모델의 시스템 상태 데이터를 1kHz로 수집하세요. FCI는 외력 추정과 추가 인사이트도 제공합니다.
커뮤니티
계속 성장하는 Franka Robotics 커뮤니티에 참여하고 C++, ROS 2 또는 MATLAB & Simulink를 활용해 로보틱스 혁신을 가속화하세요.
안전
작업자 보호를 보장하기 위해 맞춤형 안전 규칙을 구현하세요.
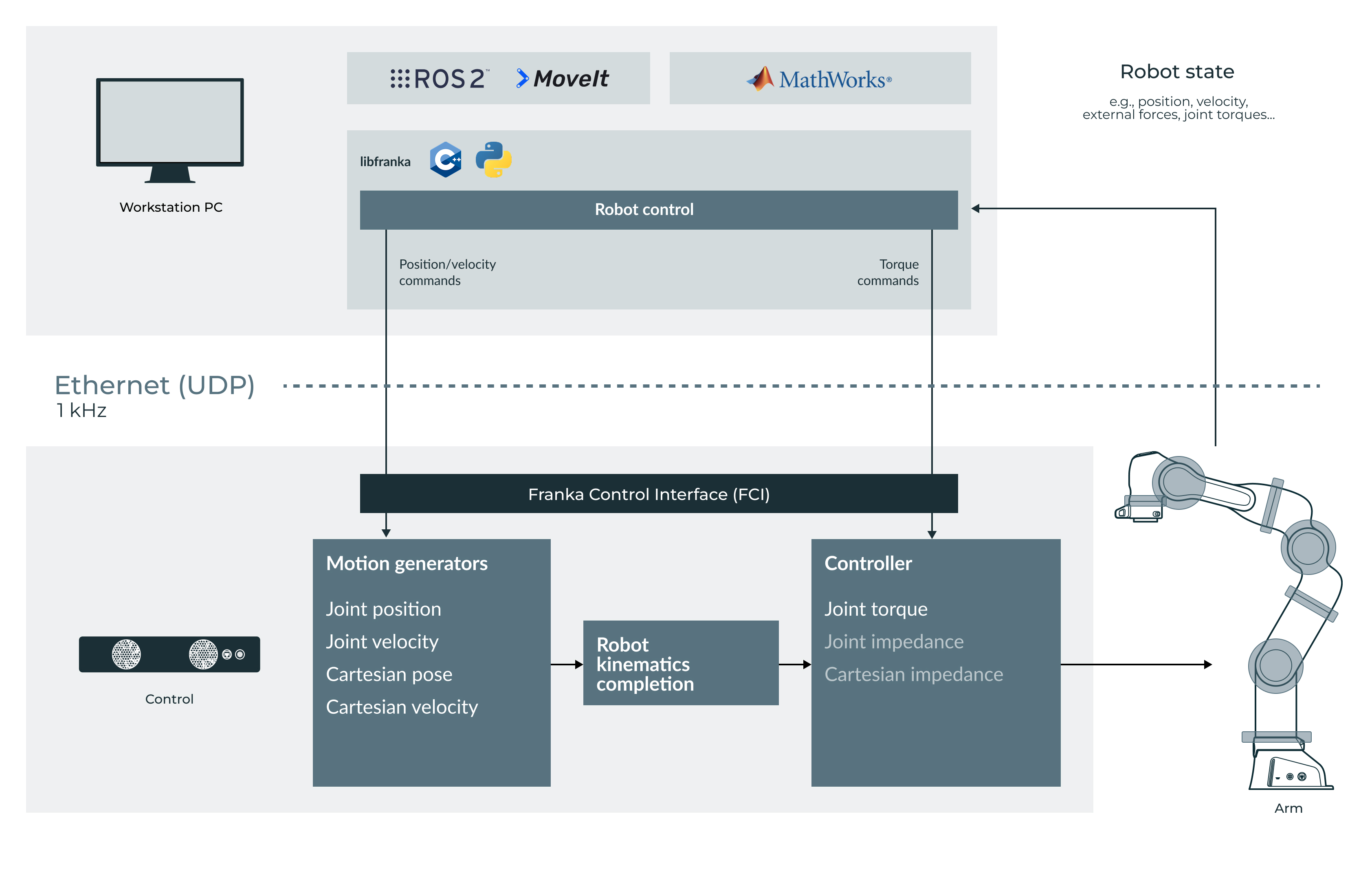
실시간 제어 및 ROS 통합
Franka Control Interface(FCI)는 암과 손에 대한 빠르고 직접적인 저수준 양방향 연결을 제공합니다. 로봇의 현재 상태를 제공하고 Ethernet으로 연결된 외부 워크스테이션 PC를 통해 직접 제어할 수 있습니다. 당사의 오픈 소스 C++ 인터페이스인 libfranka를 사용하면 5가지 서로 다른 인터페이스로 1kHz의 실시간 제어 값을 전송할 수 있습니다.
중력 및 마찰 보상이 포함된 조인트 수준 토크 명령
조인트 위치 또는 속도 명령
카테시안 포즈 또는 속도 명령
동시에 다음의 1kHz 측정값에도 접근할 수 있습니다.
조인트 데이터(예: 위치, 속도 및 링크 측 토크 센서 신호)
외부에서 가해진 토크와 힘의 추정값
다양한 충돌 및 접촉 정
로봇 모델 라이브러리는다음을 제공합니다:
모든 로봇 조인트의 운동학
모든 로봇 조인트의 자코비안 행렬
동역학, 관성 행렬, 코리올리 항 및 중력 벡터
또한,franka_ros는 Franka 로봇을 전체 ROS 2 생태계와 연결하며, libfranka를 ROS 2 Control에 통합합니다. 여기에는 URDF 모델과 당사 로봇 및 엔드 이펙터의 상세한 3D 메시가 포함되어 있어 시각화(예: RViz) 및 Gazebo 시뮬레이션이 가능합니다. 또한,MoveIt! 통합은 모션 계획과 그리퍼 제어를 간소화하며, 예제 구현을 통해 ROS 2를 사용하여 로봇을 작동하는 방법을 보여줍니다.
개발
구축, 창조, 혁신
FRANKA ROBOT 플랫폼에서 개발
Franka Research 3 로봇 플랫폼에서 작업하는 개발자들을 위한 리소스 허브입니다. 다양한 도구, 라이브러리 및 문서를 살펴보고 개발 여정을 가속화하세요. 숙련된 개발자이든 이제 막 시작하는 분이든, 구축하고 만들고 혁신하는 데 필요한 모든 것을 찾을 수 있습니다.
.png)



.svg)



_resized.png)