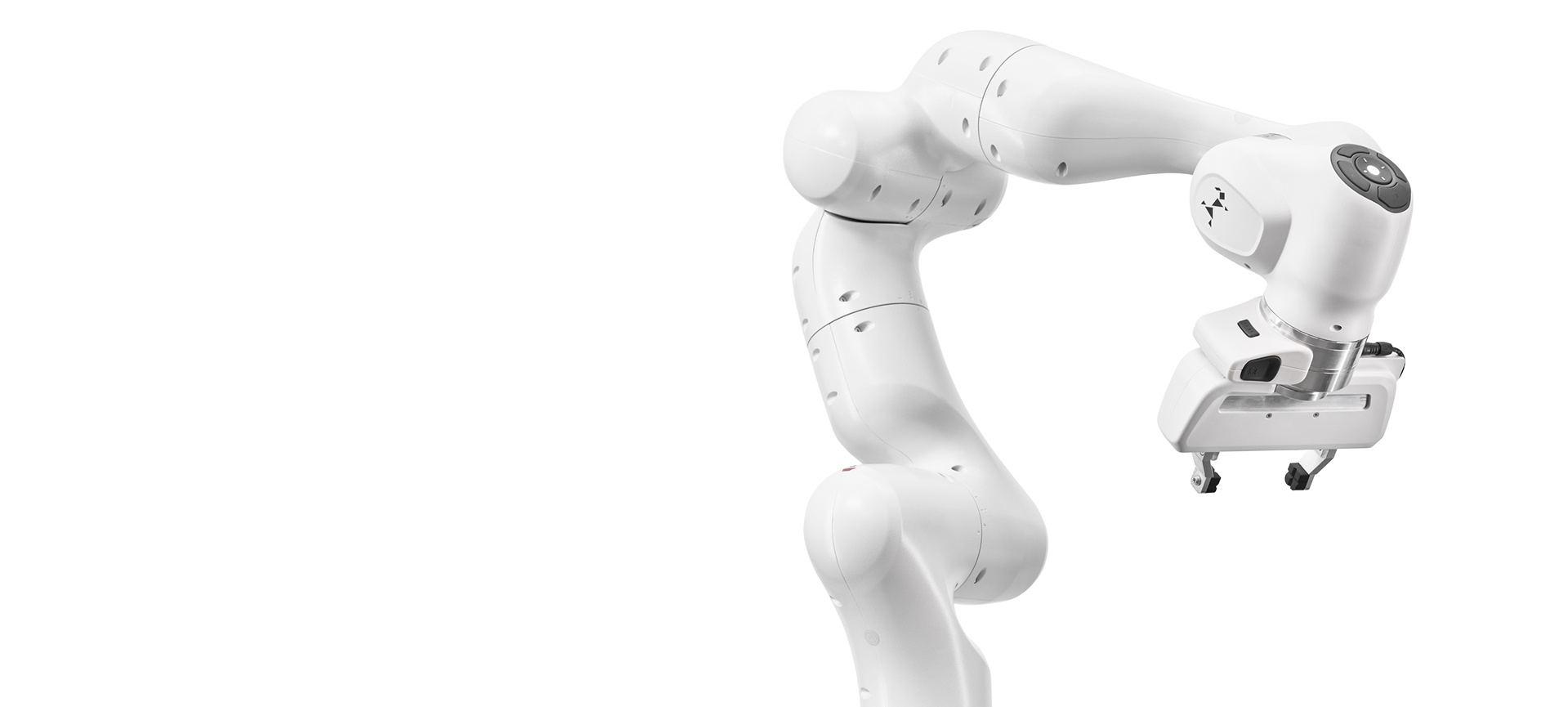
Franka Robotics bietet High-Tech-Robotersysteme, die speziell für fortschrittliche Forschung entwickelt wurden. Sie vereinen hochqualitative Mechatronik, leistungsstarke Software und vielseitige Erweiterungen und integrieren sich nahtlos mit Zubehör von Drittanbietern, um eine Vielzahl innovativer Anwendungen zu unterstützen.














_resized-1.png)

