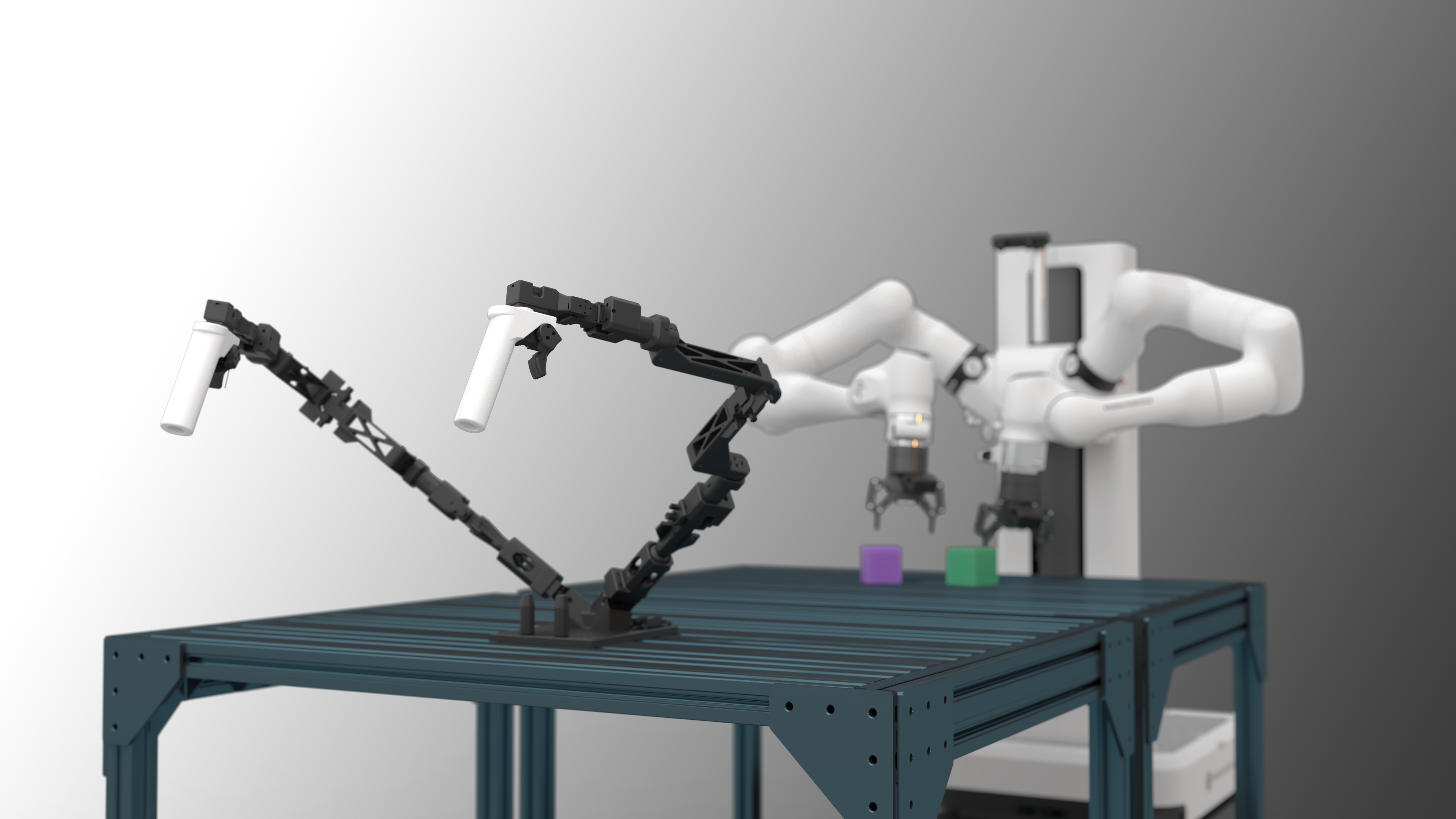
FR3 및 FR3 Duo용 원격조작 장치인 Franka GELLO와 Franka GELLO Duo는 로봇 티칭, 데이터 수집, 모방 학습 워크플로를 위한 직접적인 조인트 수준 원격조작을 가능하게 합니다. 단일 암 및 듀얼 암 구성으로 제공되며, 완전한 오픈소스 형태로 즉시 사용할 수 있습니다.
Franka GELLO와 GELLO Duo는 기계 설계와 소프트웨어 스택을 포함해 완전한 오픈소스입니다.시스템을 사용자가 직접 제작 및 수정할 수도 있고, Franka Robotics가 제공하는 사전 조립 및 테스트된 버전을 사용할 수도 있습니다 . 이를 통해 사용 사례에 따라 신속한 현장 적용과 완전한 맞춤화가 모두 가능합니다.
즉시 사용 가능한 원격조작 시스템
Franka GELLO와 Franka GELLO Duo는 ROS 2 프레임워크를 통해 FR3 및 FR3 Duo와 통합되어, 저지연 조인트 제어와 그리퍼 구동(Franka Hand 및 Robotiq)이 가능합니다. devcontainer 지원과 체계적인 설정으로 사용자는 로봇 티칭 및 시연 생성용 시스템을 빠르게 설치하고 실행할 수 있습니다.
모방 학습 및 양손 조작
GELLO는 학습 기반 로보틱스 적용 분야에서 데이터 수집에 흔히 사용됩니다.대표적인 사용 사례로는 모방 학습, 양손 조작 작업, 변형 가능한 물체 핸들링, 협조적인 듀얼 암 제어에 대한 연구가 포함됩니다.
단일 암 및 듀얼 암 구성
Franka GELLO는 FR3용 단일 암 버전으로, 개별 로봇 티칭과 데이터 생성에 사용됩니다.Franka GELLO Duo는 이를 FR3 Duo로 확장하여 양손 원격조작과 동기화된 듀얼 암 데이터 수집을 가능하게 합니다.두 시스템 모두 동일한 오픈소스 기반을 공유하며, FrankaRobotics에서 완전 조립형 시스템으로도 제공됩니다.
오픈소스 리소스
커뮤니티
오픈소스 하드웨어 & 소프트웨어
Franka GELLO는 기계 설계부터 소프트웨어 스택까지 완전한 오픈소스입니다. 3D 프린팅용 모든 STL 파일이 공개되어 있으며, 베이스 마운트부터 트리거 어셈블리까지 모든 구조 부품을 포함합니다. 또한 ROS 2를 통합해 별도 설정 없이 저지연 조인트 제어와 그리퍼 구동이 가능합니다. 하드웨어를 출력하거나, 소프트웨어 스택을 사용하거나, 새로운 연구 적용 분야에서 이를 확장할 수 있습니다.
Franka Research 3 로봇 플랫폼에서 작업하는 개발자들을 위한 리소스 허브입니다. 다양한 도구, 라이브러리 및 문서를 살펴보고 개발 여정을 가속화하세요. 숙련된 개발자이든 이제 막 시작하는 분이든, 구축하고 만들고 혁신하는 데 필요한 모든 것을 찾을 수 있습니다.
.png)

