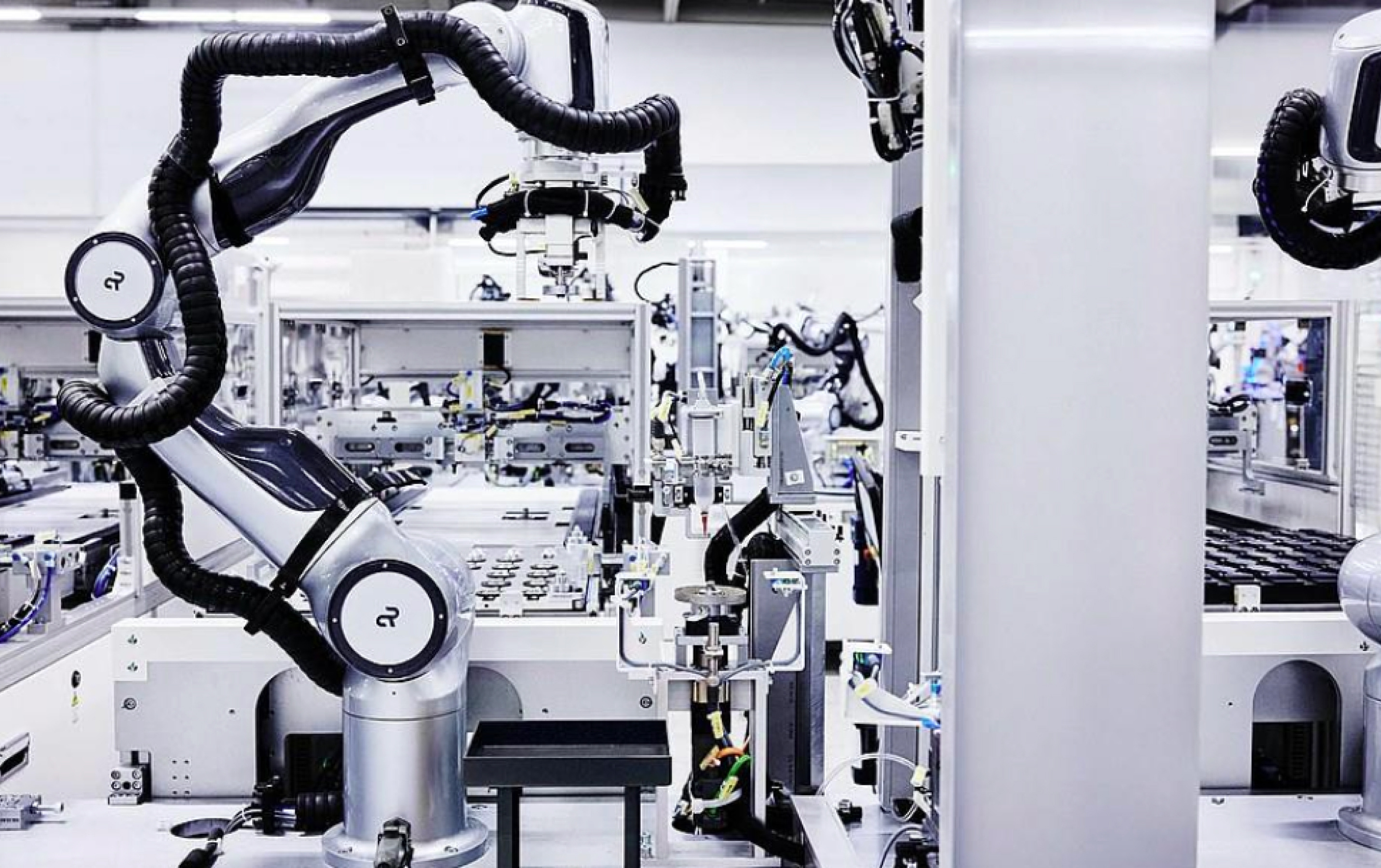
Agile Robots의 힘 감지형 로봇 Diana 7은7축, 7kg 가반하중, 높은 정밀성이 돋보입니다. 이제 Franka Control Interface(FCI)가 통합되어 사용자는 제어 루프에 접근하고 1kHz로 센서의 시스템 상태 데이터를 수집할 수 있어 Diana 7은 연구용으로도 탁월합니다.
Agile Robots의 힘 감지형 로봇 Diana 7은7축, 7kg 가반하중, 높은 정밀성이 돋보입니다. 이제 Franka Control Interface(FCI)가 통합되어 사용자는 제어 루프에 접근하고 1kHz로 센서의 시스템 상태 데이터를 수집할 수 있어 Diana 7은 연구용으로도 탁월합니다.
Franka Control Interface(FCI)는 로보틱스 연구자들에게 실시간 센서 데이터(1kHz)에 대한 접근을 제공하고, 조인트 공간에서의 정밀한 위치, 속도, 토크 제어는 물론 카르테시안 공간에서의 위치, 속도, 힘 제어도 지원합니다.이는 모션 제어 연구와 첨단 특정 동작 개발에 이상적입니다.