ENTWICKELN AUF DER FRANKA ROBOTERPLATTFORM
Erste Schritte
Wichtige Ressourcen zur Einrichtung, Nutzung und Bedienung deines Franka-Robotersystems.
- System Image Changelog [link] | Vollständige Historie der System-Image-Versionen mit neuen Funktionen, Verbesserungen und Fehlerbehebungen.
- Produktdokumentation [link] | Produkt-Handbücher sowie ergänzende Materialien wie Datenblätter und Schnellstartanleitungen für die Installation.
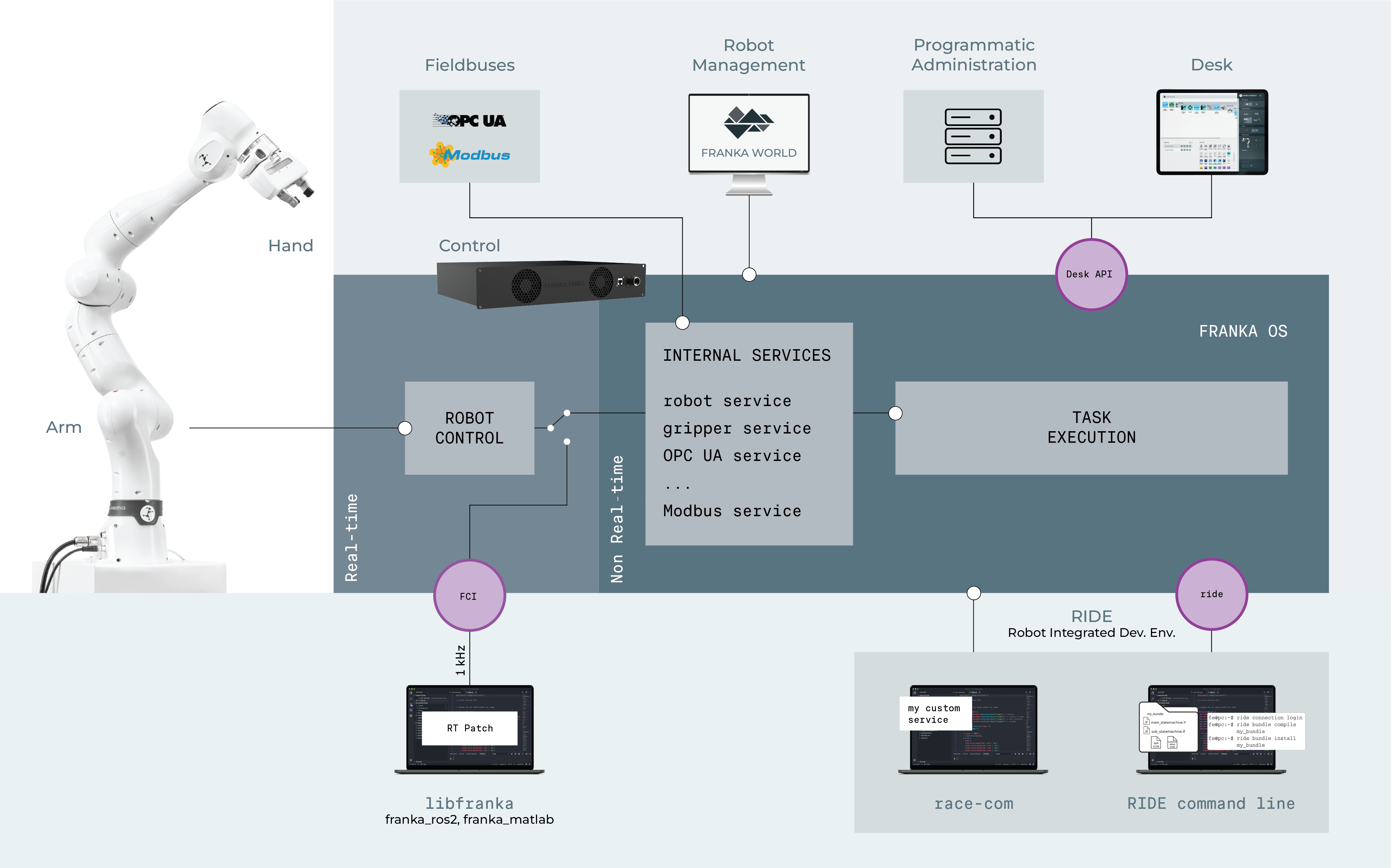
- Systemübersicht [link] | Eine visuelle Darstellung der Systemkomponenten, ihrer Verbindungen und Interaktionen.
FCI, libfranka, Toolbox für MATLAB, ROS, ROS 2
Eine Sammlung offizieller Bibliotheken, Toolboxes und Dokumentationen zur Integration, Steuerung und Simulation von Franka-Robotern auf verschiedenen Plattformen.
- FCI-Dokumentation [Link] | Übersicht, Tutorials und Installationsanleitungen für das Franka Control Interface.
- libfranka [source code] [api docs] | C++-Bibliothek mit Zugriff auf das kinematische und dynamische Modell des Roboters.
- pylibfranka [repo] Die offizielle Python-Bindung für libfranka (≥ 0.16.0), die direkten Zugriff auf Franka Roboter ermöglicht. Enthält Beispielskripte für verschiedene Controller, Greiferoperationen und das Auslesen des Roboterzustands.
- ROS [source code] [ros wiki] | Integration in das MoveIt-Planungssystem mit Unterstützung für Multi-Arm-Konfigurationen, externe Greifer und Bildverarbeitungssysteme.
- ROS 2 – Humble Support [source code] [documentation] | ROS2-Integration von libfranka: Drehmomentregelung über ros2_control mit MoveIt2- und Greifer-Unterstützung.
- ROS 2 – Jazzy Support [source code] [documentation] | Offizielle Unterstützung für ROS 2 Jazzy (ab franka_ros2 v3.0.0), die eine stabile und verlässliche Grundlage für Forschungs- und Entwicklungs-Workflows bietet.
- Franka Toolbox für MATLAB [Repo] [Dokumentation] [Webpage] | Jetzt Open-Source und frei lizenziert. Voller Zugriff auf alle Echtzeitschnittstellen und dynamischen Modellparameter in der Simulink Toolbox.
Die Nutzung der Franka Toolbox für MATLAB setzt zusätzliche Software von The MathWorks, Inc. voraus. Weitere Details sind in der Dokumentation zu finden. Eine Übersicht zur Kompatibilität verschiedener Versionen von Franka Toolbox für MATLAB, libfranka und MATLAB®/Simulink® findest du ebenfalls in der Dokumentation.
- Archivierte Franka Toolbox für MATLAB* [version 3.0.0] [version 2.0.0] [version 1.0.0] [version 0.3.1] [version 0.3.0] [version 0.2.1] [version 0.2.0] [version 0.1.1] | Ältere Versionen der Franka Toolbox für MATLAB.
Für die Versionen 1.0.0, 2.0.0 und 3.0.0 ist der Erwerb eines Lizenzschlüssels zur Aktivierung erforderlich.
Offizielle Demos & Integrationen
Offiziell unterstützte Beispielprojekte und Integrationen, die zeigen, wie Franka-Roboter in realen Szenarien eingesetzt werden können. Ideal, um Best Practices kennenzulernen, den Einsatz zu beschleunigen und erprobte Lösungen an eigene Anwendungen anzupassen.
- SpaceMouse-Teleoperation [Link] | ROS 2-basierte Integration zur echtzeitfähigen kartesischen Geschwindigkeitssteuerung des Franka FR3 mithilfe einer 3Dconnexion SpaceMouse. Beinhaltet Greifersteuerung, Unterstützung für mehrere Arme und Devcontainer-Setup – ideal für Teleoperation, haptische Steuerung und edukative Demonstrationen.
- GELLO Teleoperation [Link] | ROS 2-basierte Integration für die Echtzeitsteuerung des FR3 über das GELLO-Teleoperations-Framework. Ermöglicht latenzarme Gelenk-Impedanzsteuerung und Greiferbetätigung (Franka Hand und Robotiq) des FR3 über das Eingabegerät. Schnelle Einrichtung dank enthaltenem Devcontainer. Ideal für Mensch-Roboter-Interaktion, Rapid Prototyping und Ausbildung.
- Kraftempfindliche Teleoperation [Link] | ROS 2-basierte Integration für die Echtzeit-Teleoperation eines Franka Research 3 (Follower) mithilfe eines anderen Franka Research 3 (Leader). Der Follower spiegelt die Bewegungen des Leaders wider und überträgt Kontaktkräfte zurück, sodass die Bedienperson die Kräfte in Echtzeit spüren kann. Enthält Docker- und ROS 2-Quickstart-Optionen mit vollständigen Installationsanweisungen. Ideal für Forschung zu Mensch-Roboter-Kollaboration, kraftintensiver Manipulation und haptischer Interaktion.
Desk
Desk ist eine browserbasierte Benutzeroberfläche zur Erstellung einfacher Anwendungen – ideal für schnelle Setups von Roboterverhalten, Experimentkonfigurationen und Mensch-Roboter-Interaktionsdemos.
- Tutorial 1 [Link] | Einführung in Desk und seine Funktionen zur Erstellung von Tasks mit Apps.
- Tutorial 2 [Link] | Einführung in den Pilot - die Steuerung für die Franka Hand und die Desk-Benutzeroberfläche.
Desk API
Die Desk API ist eine RESTful-Schnittstelle, die dir programmatischen Zugriff auf (fast) alle Funktionen bietet, die auch über Desk möglich sind. Ideal zur Integration von Franka Robotern in größere Automatisierungssysteme – damit kannst du deinen Roboter über die grafische Desk-Oberfläche hinaus überwachen, bedienen und warten.
Mit der Desk API kannst du:
- Bremsen öffnen, das FCI aktivieren oder Sicherheitsverstöße zurücksetzen.
- Systemeinstellungen verwalten (Netzwerk, Benutzer usw.).
- Diagnosen durchführen und Benutzer-Logdateien herunterladen.
- Den Roboter in industrielle Orchestrierungstools integrieren.
Die API ist ab System Version v5.8 für alle verfügbar und kostenlos nutzbar. Alles, was Sie benötigen, ist ein Netzwerkzugang.
Desk API Referenz [Aufrufbar über das Dropdown-Menü in Desk oder direkt über den Link <Ihre Roboter-IP>/deskapi] | Enthält die vollständige Dokumentation der Endpunkte – inklusive Parameter, Methoden und Fehlermeldungen.
RIDE (Robot Integrated Development Environment) und RACE
RIDE ist ein Tool zur Entwicklung eigener Desk-Apps und zur Anbindung externer Sensoren oder weiterer Funktionalitäten an das System.
- ride-cli (RIDE Command Line Interface) Download* [Franka Research/Production 3] [Franka Emika Robot] | Kommandozeilen-Tool zur App-Entwicklung direkt auf dem Roboter.
*Noch kein App Development Feature? Kontaktiere das Franka Robotics Team
- ride-cli Dokumentation [Franka Research/Production 3] [Franka Emika Robot] | Anleitung zur Entwicklung von Apps mit ride-cli.
- race-com [download] [Dokumentation] | C-Bibliothek zur Entwicklung von Services, die Drittanbieter-Hardware und externe Ressourcen in Apps verfügbar machen.
- IDE-Plugins [Visual Studio Marketplace] [Sublime Plugin] [Vim Plugin] | Plugins für Visual Studio Code und andere Entwicklungsumgebungen zur Integration der App-Entwicklung.
3D-Assets von Robotern und Zubehör
Franka Robotics veröffentlicht offizielle 3D-Modelldateien für seine Robotersysteme. Mit dem Wachstum der Community nimmt auch die Zahl inoffizieller Versionen zu, die über verschiedene Repositories und Plattformen verstreut sind. Diese Seite ist die einzige von Franka selbst gepflegte und veröffentlichte Quelle, sodass du immer sicher sein kannst, mit der korrekten und aktuellen Geometrie zu arbeiten.
- 3D-Assets [Eigene Webseite] | Lade die Dateien von dieser Webseite herunter.
Erweiterungen
Erweitern Sie die Funktionalitäten Ihres Roboters mit zusätzlichen Software- und Hardware-Modulen.
- OPC UA Dokumentation [Franka Research 3] [Franka Emika Robot] |
Frankas Open Platform Communications Unified Architecture ermöglicht eine bestimmte Reihe von Funktionen auf Ihrem Roboter. Lesen Sie die Dokumentation, um mehr über das Potenzial und die Einsatzmöglichkeiten zu erfahren.
- Modbus [Dokumentation] |
Lesen Sie die Dokumentation, um mehr über das Potenzial von Modbus und die Einsatzmöglichkeiten für Ihren Roboter zu erfahren.
ENTDECKE DIE HERVORRAGENDEN
BEITRÄGE DER FRANKA COMMUNITY
BEITRÄGE DER FRANKA COMMUNITY