DEVELOP ON THE FRANKA ROBOT PLATFORM
Getting Started
Essential resources to help you set up, understand, and operate your Franka robot system.
- System Image Changelog [link] | Get a complete history of system image releases, including new features, improvements, and bug fixes.
- Product Documentation [link] | Get product manuals and additional supporting material like datasheets and quick guides for installation.
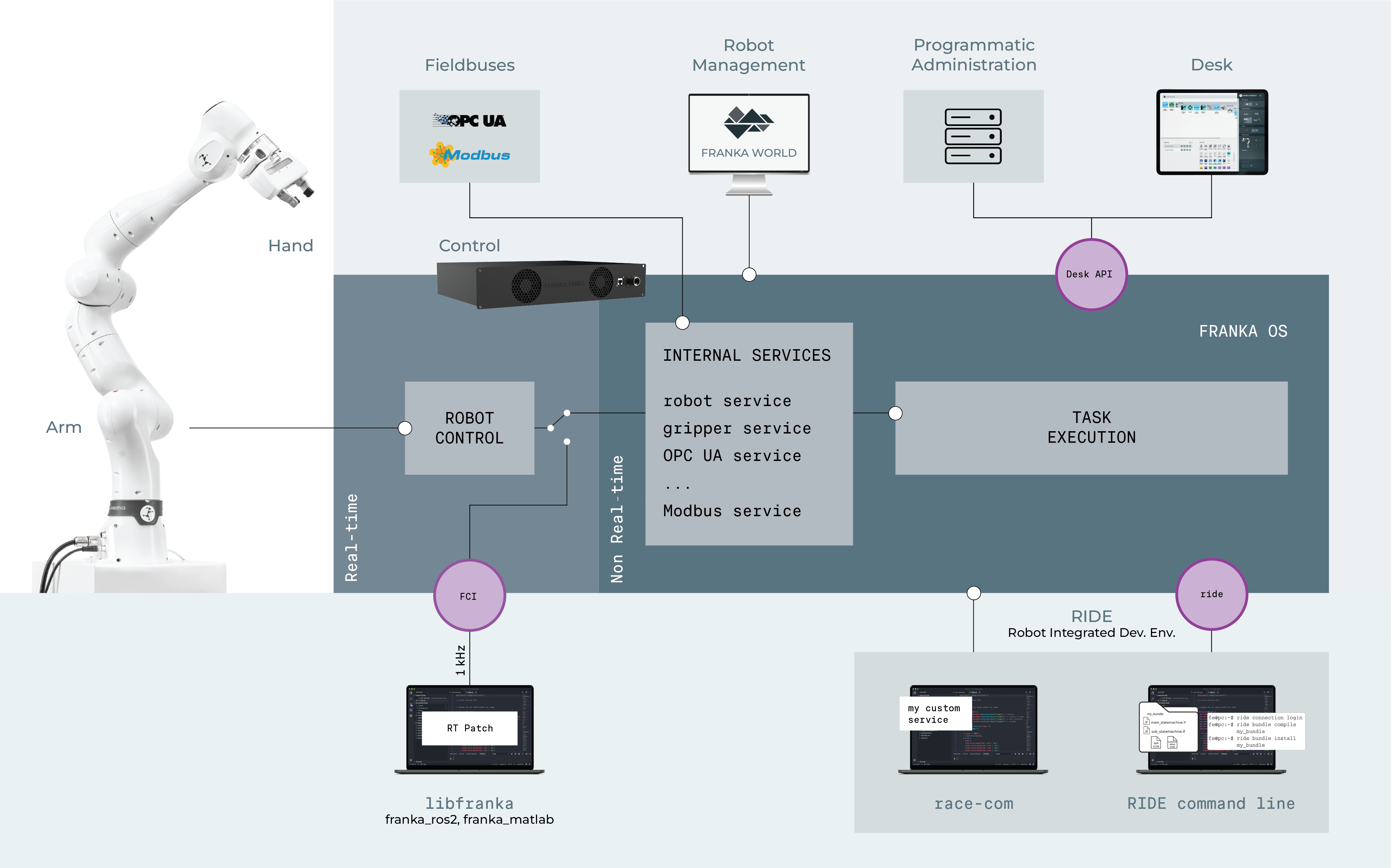
- System Overview [link] | A visual overview showing how the system components are connected and how they interact.
FCI, libfranka, Toolbox for MATLAB, ROS, ROS 2
A collection of official libraries, toolboxes, and documentation for integrating, controlling, and simulating Franka robots across various platforms.
- FCI Documentation [link] | Here you can find an overview, tutorials and install instructions for the Franka Control Interface.
- libfranka [source code] [api docs] | This library provides a C++ interface to the robot, with access to the kinematic and dynamic model of the robot.
- pylibfranka [repo] | The official Python binding for libfranka (≥ 0.16.0), giving you direct control of Franka robots. Includes example scripts for different controllers, gripper operations, and reading robot state.
- ROS [source code] [ros wiki] | Integration into the MoveIt planning framework, and additional support for multi-arm configurations, external grippers and vision.
- ROS 2 – Humble Support [source code] [documentation] | ROS2 integration of libfranka: torque control via ros2_control with MoveIt2 support and gripper integration.
- ROS 2 – Jazzy Support [source code] [documentation] | Official support for ROS 2 Jazzy (starting with franka_ros2 v3.0.0), providing a stable and reliable foundation for research and development workflows.
- Franka Toolbox for MATLAB [repo] [documentation] [webpage] | Now open-source and freely licensed. Full access to all realtime interfaces and dynamic model parameters in the Simulink Toolbox.
The use of Franka Toolbox for MATLAB requires the installation of additional Software from The MathWorks, Inc. For details see the documentation. An overview of the compatibility between different versions of Franka Toolbox for MATLAB , libfranka and MATLAB® / Simulink® can be found in the documentation.
- Archived Franka Toolbox for MATLAB* | [version 3.0.0] [version 2.0.0] [version 1.0.0] [version 0.3.1] [version 0.3.0] [version 0.2.1] [version 0.2.0] [version 0.1.1] Archived versions of Franka Toolbox for MATLAB.
*Version 1.0.0, 2.0.0 and 3.0.0 require the purchase of a license key for activation.
Official Demos & Integrations
Officially supported example projects and integrations that demonstrate how to apply Franka robots in real-world scenarios. Ideal for learning best practices, accelerating deployment, and adapting validated solutions to your own applications.
- SpaceMouse Teleoperation [link] | ROS 2-based integration for real-time Cartesian velocity control of the Franka FR3 using a 3Dconnexion SpaceMouse. Includes gripper control, multi-arm support, and devcontainer setup – ideal for teleoperation, haptic control, and educational demos.
- GELLO Teleoperation [link] | ROS 2-based integration for real-time FR3 control via the GELLO teleoperation framework. Enables low-latency joint impedance control and gripper actuation (Franka Hand and Robotiq) of the FR3 via the input device. Quick setup with a devcontainer included. Ideal for HRI, rapid prototyping, and education.
- Force-Sensitive Teleoperation [link] | ROS 2-based integration for real-time teleoperation of one FR3 (follower) using another FR3 (leader). The follower mirrors the leader’s movements and transfers contact forces back, allowing the operator to feel forces in real time. Includes Docker and ROS 2 quickstart options with full setup instructions. Ideal for human-robot collaboration research, contact-rich manipulation, and haptics exploration.
LABS
LABS - Learning & Acquisition of Behaviors Suite - is an open-source microservice-driven robotics data orchestration platform that coordinates robots, sensors, and teleoperation devices in a unified data collection pipeline.
- Repository [link] | Extensive documentation is available throughout the repository, including architecture overviews, deployment guides, service-specific READMEs, and development instructions to help you get started and extend the platform.
Desk
Desk is a browser-based user interface designed for creating simple applications, perfect for quick setups of robot behaviors, experiment configurations, and human-robot interaction demos.
- Tutorial 1 [link] | Introductory tutorial about Desk and its functionalities to create Tasks with Apps.
- Tutorial 2 [link] | A tutorial about the Pilot, the controller to interact with the Franka Hand and the Desk UI.
Desk API
Desk API is a RESTful interface that gives you programmatic access to (almost) everything that can be done from Desk. Ideal for integrating Franka robots into larger automation systems, it allows you to monitor, operate, and maintain your robot beyond the graphical Desk UI.
Use the Desk API to:
- Open brakes, activate the FCI, or clear safety violations.
- Manage system configurations (network, users, etc.).
- Run diagnostics and download user log files.
- Integrate the robot into industrial orchestration tools.
The API is available for everyone and free starting with System Image v5.8. All you need is network access.
Desk API Reference [available from Desk's dropdown menu, or via the link <Your Robot IP>/deskapi] | Full endpoint documentation, including parameters, methods, and error responses.
RIDE (Robot Integrated Development Environment) and RACE
RIDE is a tool for writing custom Desk Apps and connecting external sensors and any other functionality to the system.
- ride-cli (RIDE Command Line Interface) Download* [Franka Research/Production 3] [Franka Emika Robot] | With this text-based interface you can develop Apps with your robot from the command line.
* You don't have your App Development Feature yet? Contact the Franka Robotics Team
- ride-cli Documentation [Franka Research/Production 3] [Franka Emika Robot] | Documentation for developing Apps with ride-cli.
- race-com [download] [documentation] | Use this C-Library to develop Services to make third-party hardware and external resources available to your Apps.
- IDE Plugins [Visual Studio Marketplace] [Sublime Plugin] [Vim Plugin] | Here you can download plugins for Visual Studio Code or other IDEs to include App development functionalities into your IDE.
3D Assets of Robots and Accessories
Franka Robotics releases official 3D model files for its robot systems. As the community grows, so does the number of unofficial versions scattered across repositories and platforms. This page is the single source maintained and released directly by Franka — so you always know you are working with the correct, up-to-date geometry.
- 3D Assets [Dedicated Webpage] | Download files from this webpage.
Extensions
Extend your robot functionalities with additional software and hardware modules.
- OPC UA Documentation [Franka Research 3] [Franka Emika Robot] | Franka's Open Platform Communications Unified Architecture enables a certain set of functions on your robot. Check the documentation to learn more about its potential and usage possibilities.
- Modbus [Documentation] | Check the documentation to learn more about the potential of Modbus and usage possibilities for your robot.
DISCOVER THE BRILLIANT
CONTRIBUTIONS OF THE
FRANKA COMMUNITY
CONTRIBUTIONS OF THE
FRANKA COMMUNITY