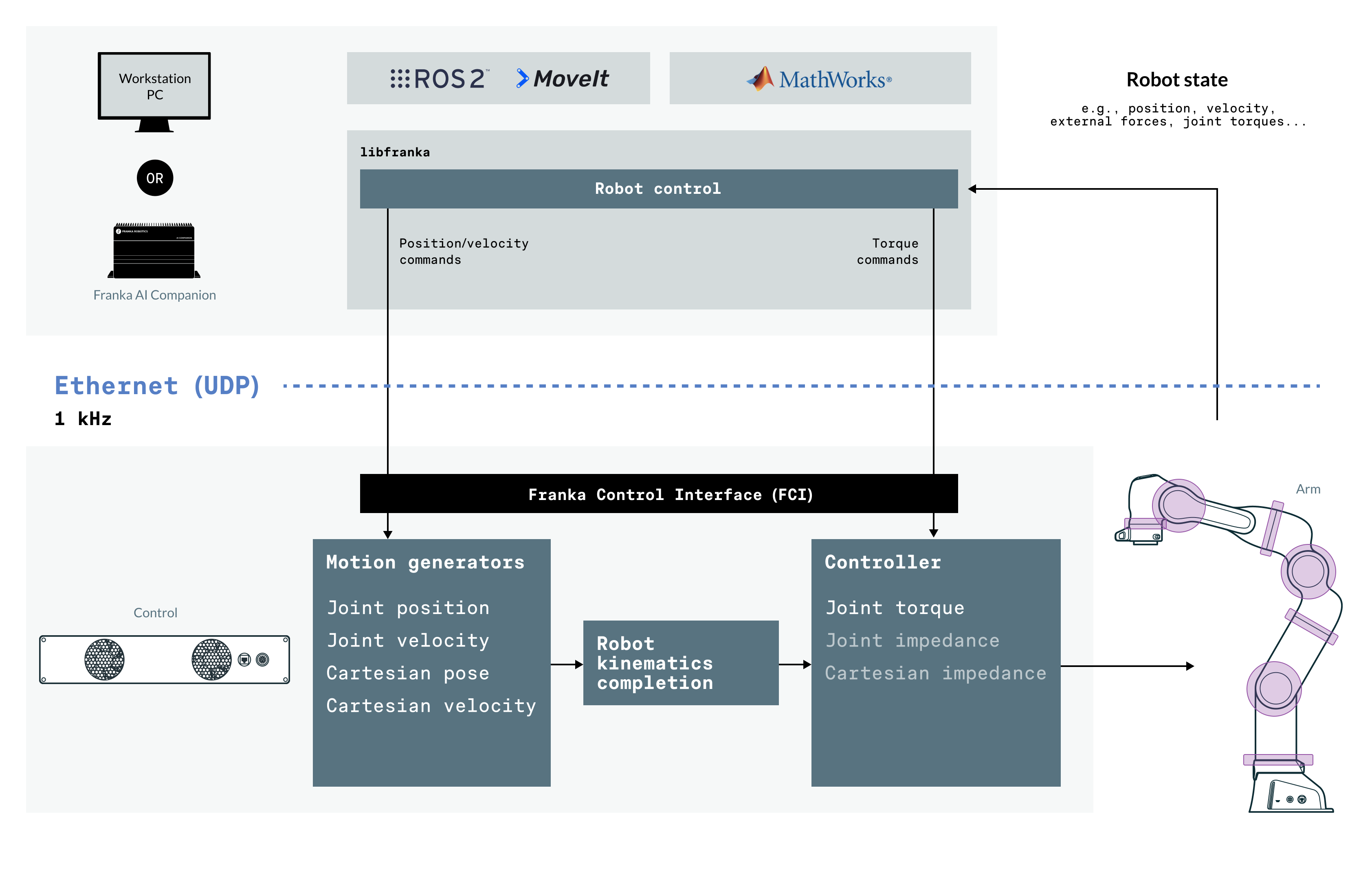
FCI provides low-level, real-time control of the robot, without internal transformation. Internal supervision only prevents self-damage. Gain access to the control loop, including position, velocity and torque in joint space, as well as position and velocity in Cartesian space.




resized.jpg)